|
Research Interests:
Signal, image/video processing and communication, computer vision, medical imaging;
Past Research:
 Current
Research:
Current
Research:
3D Scanning of moving objects based on "one snap" FTP methods
The 3D scanners are gaining huge spreading in the market today, but the great majority of them can only scan surfaces of stationary objects.
The innovation of the project consists in extracting the surface skin of an object without imposing it to stop.
The calibration grid
The scanner
You will find here following some preliminary results:
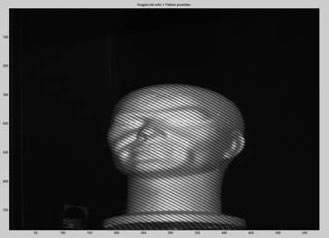


The otput with the texture
Click on The image to enlarge it !
The Vrml file of the output is about 19MB
even zipped it was to big to link here,
If You need It please e-mail me


The goal of this work was:
When the scanner is calibrated?
Camera & Projectors
- Intrinsic parameters:
o Focal length
o Principal point
o Skew coefficient (angle between the x and y pixel axes )
o Distortions (radial and tangential)- Extrinsic parameters:
o Rotations
o Translations
Innovation of the method
Improvements
The Double Radon Transform
.gif)
.gif)
The Klaus Kohlmann algorithm
applicable only in the range from - 5° to 5° rotations
.gif)
Combining the two algorithms potentialities
Example:
Click on the image to open the movie
.gif)
.gif)
.gif)